Planning, Fast and Slow: A Framework for Adaptive Real-Time Safe Trajectory Planning Berkeley Hybrid Systems Lab 3:01 6 years ago 2 537 Далее Скачать
Planning, Fast and Slow: A Framework for Adaptive Real-Time Safe Trajectory Planning ICRA 2018 3:00 6 years ago 383 Далее Скачать
DPMPC-Planner: A real-time UAV trajectory planning framework for static environments with dynamic Zhefan@CMU 2:44 2 years ago 330 Далее Скачать
A Fast Planning Approach for 3D Short Trajectorywith a Parallel Framework Arc Lab 5:10 3 years ago 320 Далее Скачать
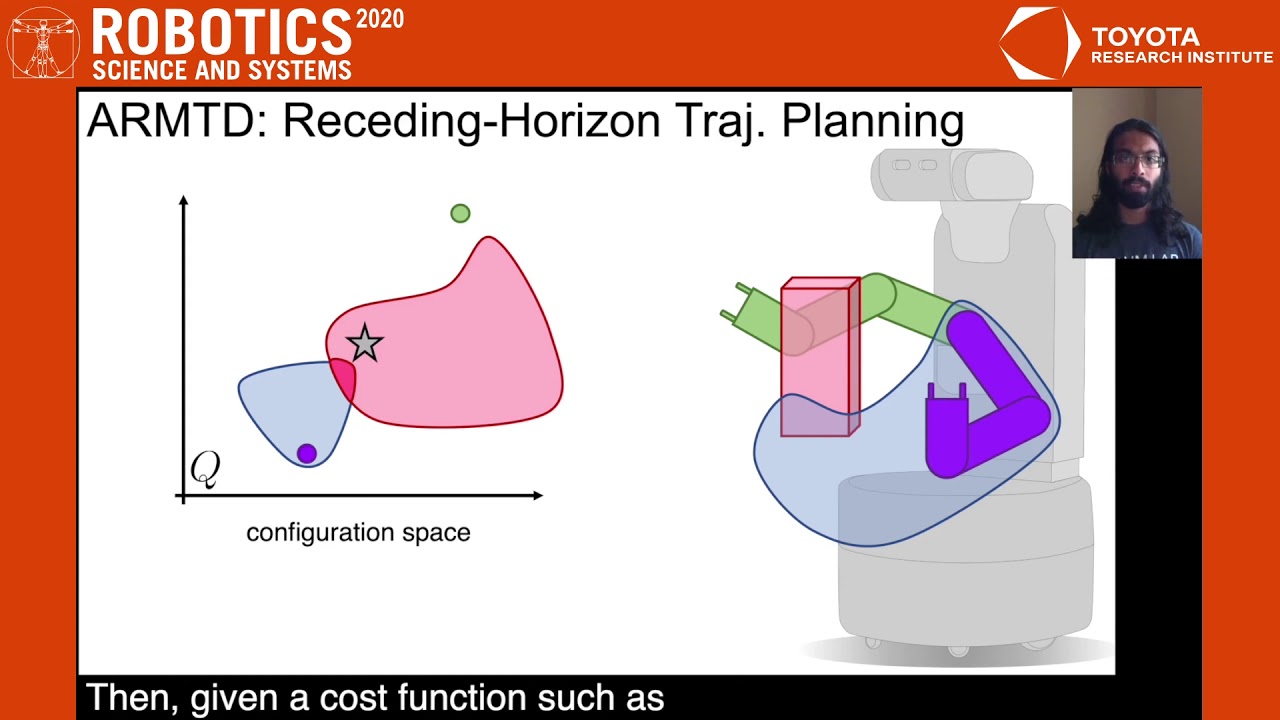
Reachable Sets for Safe, Real-Time Manipulator Trajectory Design Roahm Lab 2:54 4 years ago 1 438 Далее Скачать
[Ground Robot Sim] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments AerospaceControlsLab 0:31 4 years ago 2 227 Далее Скачать
A real-time trajectory planning method for enhanced path-tracking performance of serial manipulators Automatic Control for Intelligent Robotics 0:53 3 years ago 370 Далее Скачать
RSS 2020, Spotlight Talk 100: Reachable Sets for Safe, Real-Time Manipulator Trajectory Design Robotics Science and Systems 5:00 4 years ago 1 333 Далее Скачать
[IROS 2019] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments AerospaceControlsLab 1:00 5 years ago 4 593 Далее Скачать
[RA-L & IROS 2022] FISS: A Trajectory Planning Framework using Fast Iterative Search and Sampling... NUS Advanced Robotics Centre 6:02 2 years ago 383 Далее Скачать
Efficient Trajectory Planning for High Speed Flight in Unknown Environments Markus Ryll 3:01 5 years ago 531 Далее Скачать
Efficient and Robust Time-Optimal Trajectory Planning and Control for Agile Quadrotor Flight - ziyu zhou 1:55 1 year ago 549 Далее Скачать
Markus Ryll | Path and Trajectory Planning for Autonomous Agents | Tartan Planning Series AirLab 1:00:53 Streamed 1 year ago 1 163 Далее Скачать
Fast trajectory planning and control of a lab-scale 3D gantry crane for a moving target Automation and Control Institute - TU Wien 2:00 1 year ago 299 Далее Скачать
Fast Trajectory Planning for Multiple Quadrotors using Relative Safe Flight Corridor LARR SNU 1:00 4 years ago 1 114 Далее Скачать